
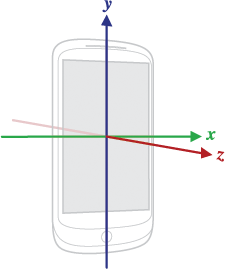
SensorEvent使用的系统坐标系
TYPE_ACCELEROMETER = 1;
加速度计。
TYPE_ACCELEROMETER_UNCALIBRATED = 35;
无标定加速度计。
TYPE_AMBIENT_TEMPERATURE = 13;
环境温度。values[0]代表环境的摄氏温度。
TYPE_DEVICE_PRIVATE_BASE = 65536;
设备私有传感器定义范围基础值。
TYPE_GAME_ROTATION_VECTOR = 15;
游戏旋转向量
TYPE_GEOMAGNETIC_ROTATION_VECTOR = 20;
TYPE_GRAVITY = 9;
重力。
TYPE_GYROSCOPE = 4;
陀螺仪。对应值表示设备沿x, y, z三轴旋转的速度(弧度/秒),逆时针旋转时值为正
values[0]: Angular speed around the x-axis
values[1]: Angular speed around the y-axis
values[2]: Angular speed around the z-axis
TYPE_GYROSCOPE_UNCALIBRATED = 16;
TYPE_HEART_BEAT = 31;
TYPE_HEART_RATE = 21;
TYPE_LIGHT = 5;
环境亮度。
TYPE_LINEAR_ACCELERATION = 10;
线性加速度。表示沿设备各个轴的线性加速度值,已去除重力的影响。单位m/s^2,坐标系和加速度计的相同。
加速度计、重力和线性加速度计需要满足下面的公式
加速度=重力+线性加速度
TYPE_LOW_LATENCY_OFFBODY_DETECT = 34;
TYPE_MAGNETIC_FIELD = 2;
TYPE_MAGNETIC_FIELD_UNCALIBRATED = 14;
TYPE_MOTION_DETECT = 30;
TYPE_ORIENTATION = 3;
横滚角-roll、俯仰角-pitch、偏航角-yaw
返回值的单位为度
- values[0]:方位角,磁场北极和y轴的夹角,其实就是沿z轴的旋转角度(范围:0-359),0-正北,90-正东,180-正南,270-正西。
- values[1]:俯仰角,手机沿x轴的旋转角度,范围-180-180度,手机头朝下旋转时为正值,手机头朝上旋转时为负值
- values[2]:横滚角,手机沿y轴的旋转角度,范围-90-90度,逆时针旋转为正值,顺时针旋转为负值
TYPE_POSE_6DOF = 28;
TYPE_PRESSURE = 6;
values[0]表示大气压,单位hPa(百帕)
TYPE_PROXIMITY = 8;
TYPE_RELATIVE_HUMIDITY = 12;
TYPE_ROTATION_VECTOR = 11;
TYPE_SIGNIFICANT_MOTION = 17;
TYPE_STATIONARY_DETECT = 29;
TYPE_STEP_COUNTER = 19;
TYPE_STEP_DETECTOR = 18;
https://developer.android.google.cn/reference/android/hardware/SensorEvent

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~
Sorry, the comment form is closed at this time.