GridView继承自BoxScrollView,BoxScrollView继承自ScrollView
GridView有多种构建函数
GridView
GridView.builder
GridView.count
GridView.custom
GridView.extent

GridView继承自BoxScrollView,BoxScrollView继承自ScrollView
GridView有多种构建函数
GridView
GridView.builder
GridView.count
GridView.custom
GridView.extent
将项目的原来的gradle版本由5.1.1升级到7.2版本后再编译就报如下错误
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 |
FAILURE: Build completed with 5 failures. 1: Task failed with an exception. ----------- * What went wrong: A problem was found with the configuration of task ':app:checkDebugManifest' (type 'CheckManifest'). - In plugin 'com.android.build.gradle.api.AndroidBasePlugin' type 'com.android.build.gradle.internal.tasks.CheckManifest' property 'manifest' has @Input annotation used on property of type 'File'. Reason: A property of type 'File' annotated with @Input cannot determine how to interpret the file. Possible solutions: 1. Annotate with @InputFile for regular files. 2. Annotate with @InputDirectory for directories. 3. If you want to track the path, return File.absolutePath as a String and keep @Input. Please refer to https://docs.gradle.org/7.2/userguide/validation_problems.html#incorrect_use_of_input_annotation for more details about this problem. * Try: Run with --stacktrace option to get the stack trace. Run with --info or --debug option to get more log output. Run with --scan to get full insights. ============================================================================== 2: Task failed with an exception. ----------- * What went wrong: A problem was found with the configuration of task ':app:createDebugCompatibleScreenManifests' (type 'CompatibleScreensManifest'). - In plugin 'com.android.build.gradle.api.AndroidBasePlugin' type 'com.android.build.gradle.tasks.CompatibleScreensManifest' property 'outputScope' is missing an input or output annotation. Reason: A property without annotation isn't considered during up-to-date checking. Possible solutions: 1. Add an input or output annotation. 2. Mark it as @Internal. Please refer to https://docs.gradle.org/7.2/userguide/validation_problems.html#missing_annotation for more details about this problem. * Try: Run with --stacktrace option to get the stack trace. Run with --info or --debug option to get more log output. Run with --scan to get full insights. ============================================================================== 3: Task failed with an exception. ----------- * What went wrong: A problem was found with the configuration of task ':app:compileDebugShaders' (type 'ShaderCompile'). - In plugin 'com.android.build.gradle.api.AndroidBasePlugin' type 'com.android.build.gradle.tasks.ShaderCompile' property 'sourceDir' is annotated with @InputFiles but missing a normalization strategy. Reason: If you don't declare the normalization, outputs can't be re-used between machines or locations on the same machine, therefore caching efficiency drops significantly. Possible solution: Declare the normalization strategy by annotating the property with either @PathSensitive, @Classpath or @CompileClasspath. Please refer to https://docs.gradle.org/7.2/userguide/validation_problems.html#missing_normalization_annotation for more details about this problem. * Try: Run with --stacktrace option to get the stack trace. Run with --info or --debug option to get more log output. Run with --scan to get full insights. ============================================================================== 4: Task failed with an exception. ----------- * What went wrong: Some problems were found with the configuration of task ':app:signingConfigWriterDebug' (type 'SigningConfigWriterTask'). - In plugin 'com.android.build.gradle.api.AndroidBasePlugin' type 'com.android.build.gradle.internal.tasks.SigningConfigWriterTask' property 'signingConfig.name' is missing an input or output annotation. Reason: A property without annotation isn't considered during up-to-date checking. Possible solutions: 1. Add an input or output annotation. 2. Mark it as @Internal. Please refer to https://docs.gradle.org/7.2/userguide/validation_problems.html#missing_annotation for more details about this problem. - In plugin 'com.android.build.gradle.api.AndroidBasePlugin' type 'com.android.build.gradle.internal.tasks.SigningConfigWriterTask' property 'signingConfig.signingReady' is missing an input or output annotation. Reason: A property without annotation isn't considered during up-to-date checking. Possible solutions: 1. Add an input or output annotation. 2. Mark it as @Internal. Please refer to https://docs.gradle.org/7.2/userguide/validation_problems.html#missing_annotation for more details about this problem. - In plugin 'com.android.build.gradle.api.AndroidBasePlugin' type 'com.android.build.gradle.internal.tasks.SigningConfigWriterTask' property 'signingConfig.storeFile' is annotated with @InputFile but missing a normalization strategy. Reason: If you don't declare the normalization, outputs can't be re-used between machines or locations on the same machine, therefore caching efficiency drops significantly. Possible solution: Declare the normalization strategy by annotating the property with either @PathSensitive, @Classpath or @CompileClasspath. Please refer to https://docs.gradle.org/7.2/userguide/validation_problems.html#missing_normalization_annotation for more details about this problem. * Try: Run with --stacktrace option to get the stack trace. Run with --info or --debug option to get more log output. Run with --scan to get full insights. ============================================================================== 5: Task failed with an exception. ----------- * What went wrong: Some problems were found with the configuration of task ':app:transformNativeLibsWithMergeJniLibsForDebug' (type 'TransformTask'). - In plugin 'com.android.build.gradle.api.AndroidBasePlugin' type 'com.android.build.gradle.internal.pipeline.TransformTask' property 'allSecondaryInputs' is private and annotated with @Internal. Reason: Annotations on private getters are ignored. Possible solutions: 1. Make the getter public. 2. Annotate the public version of the getter. Please refer to https://docs.gradle.org/7.2/userguide/validation_problems.html#private_getter_must_not_be_annotated for more details about this problem. - In plugin 'com.android.build.gradle.api.AndroidBasePlugin' type 'com.android.build.gradle.internal.pipeline.TransformTask' property 'logging' is missing an input or output annotation. Reason: A property without annotation isn't considered during up-to-date checking. Possible solutions: 1. Add an input or output annotation. 2. Mark it as @Internal. Please refer to https://docs.gradle.org/7.2/userguide/validation_problems.html#missing_annotation for more details about this problem. - In plugin 'com.android.build.gradle.api.AndroidBasePlugin' type 'com.android.build.gradle.internal.pipeline.TransformTask' property 'oldSecondaryInputs' is annotated with @InputFiles but missing a normalization strategy. Reason: If you don't declare the normalization, outputs can't be re-used between machines or locations on the same machine, therefore caching efficiency drops significantly. Possible solution: Declare the normalization strategy by annotating the property with either @PathSensitive, @Classpath or @CompileClasspath. Please refer to https://docs.gradle.org/7.2/userguide/validation_problems.html#missing_normalization_annotation for more details about this problem. - In plugin 'com.android.build.gradle.api.AndroidBasePlugin' type 'com.android.build.gradle.internal.pipeline.TransformTask' property 'path' is missing an input or output annotation. Reason: A property without annotation isn't considered during up-to-date checking. Possible solutions: 1. Add an input or output annotation. 2. Mark it as @Internal. Please refer to https://docs.gradle.org/7.2/userguide/validation_problems.html#missing_annotation for more details about this problem. - In plugin 'com.android.build.gradle.api.AndroidBasePlugin' type 'com.android.build.gradle.internal.pipeline.TransformTask' property 'temporaryDir' is missing an input or output annotation. Reason: A property without annotation isn't considered during up-to-date checking. Possible solutions: 1. Add an input or output annotation. 2. Mark it as @Internal. Please refer to https://docs.gradle.org/7.2/userguide/validation_problems.html#missing_annotation for more details about this problem. * Try: Run with --stacktrace option to get the stack trace. Run with --info or --debug option to get more log output. Run with --scan to get full insights. ============================================================================== * Get more help at https://help.gradle.org Deprecated Gradle features were used in this build, making it incompatible with Gradle 8.0. You can use '--warning-mode all' to show the individual deprecation warnings and determine if they come from your own scripts or plugins. See https://docs.gradle.org/7.2/userguide/command_line_interface.html#sec:command_line_warnings BUILD FAILED in 7s |
网上搜索大部分说是把使用的gradle的版本降到原来的版本,但是因为ide升级原因?版本不能降
后来搜索到一个方法是把项目里的build.gradle中的gradle插件的版本升级一下,由原来的3.4.1版本升级到4.2.0再编译就好了
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
buildscript { repositories { google() jcenter() } dependencies { classpath 'com.android.tools.build:gradle:4.2.0' //原来是3.4.1 } } allprojects { repositories { google() jcenter() } } task clean(type: Delete) { delete rootProject.buildDir } |
Renderer – 渲染器
Triangle – 三角形(需要度娘了解一下为什么3D模型是用很多三角形拼接成的)
Shader – 着色器
mesh – 网格?
Matrix – 矩阵
vertex – (三角形或锥形的)角顶
Texture – 纹理
OCTREE – 八叉树,用于3D空间分割,3D空间冲突检测
cube – 立方体
|
1 2 3 4 |
public Object3D(float[] coordinates, float[] uvs, int[] indices, int textureId) |
coordinates – the coordinates [x1,y1,z1,x2,y2,z2,…]uvs – the texture coordinates [u1,v1,u2,v2,…]indices – the indices indexing the tuples/triples in the coordinate arraystextureId – the texture id. If not known, just use TextureManager.TEXTURE_NOTFOUND|
1 2 3 4 5 |
public Object3D(float[] coordinates, float[] normals, float[] uvs, int[] indices, int textureId) |
coordinates – the coordinates [x1,y1,z1,x2,y2,z2,…]normals – the vertex normals [nx1,ny1,nz1,nx2,ny2,nz2,…]uvs – the texture coordinates [u1,v1,u2,v2,…]indices – the indices indexing the tuples/triples in the coordinate arraystextureId – the texture id. If not known, just use TextureManager.TEXTURE_NOTFOUND|
1 |
public Object3D(int maxTriangles) |
|
1 |
public Object3D(Object3D obj) |
obj – the Object3D to construct this Object3D from|
1 2 |
public Object3D(Object3D obj, boolean reuseMesh) |
obj – the Object3D to construct this Object3D fromreuseMesh – if true, the new object will use the same mesh|
1 |
public static Object3D createDummyObj() |
|
1 |
public void setVirtualizer(Virtualizer virtualizer) |
virtualizer – the virtualizer|
1 |
public Virtualizer getVirtualizer() |
|
1 |
public void setUserObject(java.lang.Object obj) |
obj – Object whatever you like…|
1 |
public void setSortOffset(float offset) |
offset – the offset|
1 2 |
public static Object3D mergeObjects(Object3D first, Object3D second) |
first – the first object to mergesecond – the second object to merge|
1 |
public static Object3D mergeAll(Object3D... objs) |
objs – the objects|
1 |
public static void resetNextID() |
|
1 |
public static int getNextID() |
|
1 |
public static void setNextID(int next) |
next – the next ID|
1 |
public void compile() |
|
1 |
public void compile(boolean dynamic) |
dynamic – if the mesh dynamic?|
1 2 |
public void compile(boolean dynamic, boolean staticUV) |
dynamic – if the mesh dynamic?staticUV – does it use static uv-coordinates|
1 |
public void shareCompiledData(<a title="class in com.threed.jpct" href="https://www.jpct.net/jpct-ae/doc/com/threed/jpct/Object3D.html">Object3D</a> withObj) |
withObj – the object to share data with|
1 |
public void touch() |
|
1 |
public void strip() |
|
1 |
public void forceGeometryIndices(boolean force) |
force – should we?|
1 |
public void setAnimationSequence(Animation anim) |
anim – the animation sequenceAnimation, getMesh()|
1 |
public void clearAnimation() |
|
1 |
public Animation getAnimationSequence() |
|
1 2 |
public void animate(float index, int seq) |
index – the “time-index” into the sub-sequence of the animationseq – the number of the sub.sequence (sub-sequence start at 1, 0 stands for the animation as a whole)|
1 |
public void animate(float index) |
index – the “time-index” into the animation|
1 |
public void setCollisionMode(int mode) |
mode – The desired mode (COLLISION_CHECK_NONE, COLLISION_CHECK_OTHERS, COLLISION_CHECK_SELF or combinations)COLLISION_CHECK_NONE, COLLISION_CHECK_OTHERS, COLLISION_CHECK_SELF|
1 |
public void setCollisionOptimization(boolean optimized) |
optimized – should the collision detection be optimized or notCOLLISION_DETECTION_OPTIMIZED, COLLISION_DETECTION_NOT_OPTIMIZED|
1 |
public void setVisibility(boolean mode) |
mode – visible or notOBJ_VISIBLE, OBJ_INVISIBLE|
1 |
public void calcBoundingBox() |
build()|
1 |
public void build() |
World.buildAllObjects()|
1 |
public void build(boolean staticUV) |
build()|
1 |
public void disableVertexSharing() |
|
1 |
public boolean hasChild(Object3D obj) |
|
1 |
public boolean hasParent(Object3D obj) |
|
1 |
public void addChild(Object3D obj) |
|
1 |
public void removeChild(Object3D obj) |
|
1 |
public void removeParent(Object3D obj) |
obj – the Object3D to remove|
1 |
public void addParent(Object3D obj) |
obj – the object that should become a parent of this.|
1 |
public Object3D[] getParents() |
|
1 |
public int getID() |
resetNextID(), World.addObject(com.threed.jpct.Object3D)|
1 |
public void setName(java.lang.String n) |
|
1 |
public boolean wasVisible() |
|
1 |
public void setCulling(boolean mode) |
|
1 |
public void setShadingMode(int mode) |
mode – the shading modeSHADING_GOURAUD, SHADING_FAKED_FLAT|
1 |
public void setLighting(int mode) |
mode – the lighting modeLIGHTING_ALL_ENABLED, LIGHTING_NO_LIGHTS|
1 |
public int getLighting() |
LIGHTING_ALL_ENABLED, LIGHTING_NO_LIGHTS|
1 |
public void setMaxLights(int lightCount) |
lightCount – a value between 0 and 8|
1 |
public int getMaxLights() |
|
1 |
public void setSpecularLighting(boolean mode) |
mode – the specular modeSPECULAR_ENABLED, SPECULAR_DISABLED|
1 |
public boolean getSpecularLighting() |
SPECULAR_ENABLED, SPECULAR_DISABLED|
1 |
public void setTransparency(int trans) |
trans – the tranparency level. 0 is the highest possible transparency, a value below 0 will disable tranparency for this object|
1 |
public void setShader(GLSLShader shader) |
shader – the shader|
1 |
public GLSLShader getShader() |
|
1 |
public void calcTangentVectors() |
|
1 |
public void clearShader() |
|
1 |
public int getTransparency() |
|
1 |
public boolean isTransparent() |
|
1 |
public void setTransparencyMode(int mode) |
mode – the modeTRANSPARENCY_MODE_DEFAULT, TRANSPARENCY_MODE_ADD|
1 |
public int getTransparencyMode() |
TRANSPARENCY_MODE_DEFAULT, TRANSPARENCY_MODE_ADD|
1 |
public boolean hasVertexAlpha() |
|
1 |
public void setAlphaWrites(boolean alphaWrites) |
alphaWrites – do alpha writes or not|
1 |
public boolean isAlphaWrites() |
|
1 |
public void setAdditionalColor(RGBColor col) |
col – the color|
1 2 3 |
public void setAdditionalColor(int red, int green, int blue) |
red – the red component (0..255)green – the green component (0..255)blue – the blue component (0..255)|
1 |
public RGBColor getAdditionalColor() |
|
1 |
public void clearAdditionalColor() |
|
1 |
public void clearObject() |
cloneObject(), decoupleMesh()|
1 |
public void decoupleMesh() |
cloneObject(), clearObject()|
1 |
public void setBillboarding(boolean mode) |
|
1 |
public boolean isEnvmapped() |
ENVMAP_ENABLED, ENVMAP_DISABLED|
1 |
public void setEnvmapped(boolean mode) |
mode – the environment mapping modeENVMAP_ENABLED, ENVMAP_DISABLED|
1 |
public void setFixedPointMode(boolean useFixedPoint) |
useFixedPoint – use it?|
1 |
public void rotateX(float w) |
w – 旋转角度,弧度值,逆时针为正,顺时针为负。一周的弧度数为2πr/r=2π,360°角=2π弧度,因此,1弧度约为57.3°,即57°17’44.806”|
1 |
public void rotateY(float w) |
w – 旋转角度,弧度值,逆时针为正,顺时针为负。一周的弧度数为2πr/r=2π,360°角=2π弧度,因此,1弧度约为57.3°,即57°17’44.806”|
1 |
public void rotateZ(float w) |
w – 旋转角度,弧度值,逆时针为正,顺时针为负。一周的弧度数为2πr/r=2π,360°角=2π弧度,因此,1弧度约为57.3°,即57°17’44.806”|
1 2 |
public void rotateAxis(SimpleVector axis, float angle) |
axis – a direction-vector pointing into the axis direction with the object’s rotation pivot as position vectorangle – the angle of the rotation|
1 |
public void translateMesh() |
|
1 |
public void translate(SimpleVector trans) |
trans – the translation vector|
1 2 3 |
public void translate(float x, float y, float z) |
x – the number of units the object should be translated parallel to the x axisy – the number of units the object should be translated parallel to the y axisz – the number of units the object should be translated parallel to the z axis|
1 |
public void align(Camera camera) |
camera – the Camera the Object3D should be aligned with|
1 |
public void align(Object3D object) |
object – the object this object should be aligned with|
1 2 |
public void setOrientation(SimpleVector dir, SimpleVector up) |
dir – the directionup – the up-vector|
1 |
public void enableLazyTransformations() |
disableLazyTransformations()|
1 |
public void disableLazyTransformations() |
enableLazyTransformations()|
1 |
public void scale(float scale) |
scale – the new scalesetScale(float)|
1 |
public void setScale(float absScale) |
absScale – the new (absolute) scalescale(float)|
1 |
public float getScale() |
|
1 |
public SimpleVector getTranslation() |
|
1 |
public SimpleVector getTranslation(SimpleVector trns) |
trns – the SimpleVector to fill and return|
1 |
public SimpleVector getOrigin() |
|
1 |
public SimpleVector getXAxis() |
|
1 |
public SimpleVector getYAxis() |
|
1 |
public SimpleVector getZAxis() |
|
1 |
public SimpleVector getXAxis(SimpleVector toFill) |
toFill – the vector to fill|
1 |
public SimpleVector getYAxis(SimpleVector toFill) |
toFill – the vector to fill|
1 |
public SimpleVector getZAxis(SimpleVector toFill) |
toFill – the vector to fill|
1 |
public Matrix getRotationMatrix() |
|
1 |
public Matrix getTranslationMatrix() |
|
1 |
public Matrix getOriginMatrix() |
translate(float,float,float), setOrigin(com.threed.jpct.SimpleVector)|
1 |
public int getLightCount() |
|
1 |
public void setRotationMatrix(Matrix mat) |
mat – the new rotation matrixrotateX(float), rotateY(float), rotateZ(float)|
1 |
public void clearRotation() |
|
1 |
public void clearTranslation() |
|
1 |
public void setTextureMatrix(Matrix mat) |
mat – the matrix|
1 |
public Matrix getTextureMatrix() |
|
1 |
public void rotateMesh() |
|
1 |
public void setTranslationMatrix(Matrix mat) |
|
1 |
public void setMesh(<a title="class in com.threed.jpct" href="https://www.jpct.net/jpct-ae/doc/com/threed/jpct/Mesh.html">Mesh</a> mesh) |
mesh – the new mesh of the objectgetMesh(), calcBoundingBox()|
1 |
public Mesh getMesh() |
Animation, Mesh.cloneMesh(boolean), setMesh(com.threed.jpct.Mesh)|
1 |
public PolygonManager getPolygonManager() |
strip()|
1 2 3 4 5 6 |
public void setBoundingBox(float minx, float maxx, float miny, float maxy, float minz, float maxz) |
minx – the lowest x-value of the AABBmaxx – the highest x-value of the AABBminy – the lowest y-value of the AABBmaxy – the highest y-value of the AABBminz – the lowest z-value of the AABBmaxz – the highest z-value of the AABBbuild(), calcBoundingBox()|
1 |
public Object3D cloneObject() |
|
1 |
public Matrix getWorldTransformation() |
|
1 |
public void addCollisionListener(CollisionListener listener) |
|
1 |
public void removeCollisionListener(CollisionListener listener) |
|
1 |
public void disableCollisionListeners() |
|
1 |
public void enableCollisionListeners() |
|
1 |
public java.util.Iterator<CollisionListener> getCollisionListeners() |
|
1 |
public void setRenderHook(IRenderHook hook) |
hook – the hook into the rendering pipelineIRenderHook|
1 |
public IRenderHook getRenderHook() |
|
1 |
public void addSpecificLight(Light light) |
|
1 |
public void removeSpecificLight(Light light) |
|
1 |
public void clearSpecificLights() |
|
1 2 |
public int checkForCollision(SimpleVector dirVec, float step) |
dirVec – the direction vector (a unit vector)step – the length of the casted ray (a collision will only be detected of it takes place within this range)setCenter(com.threed.jpct.SimpleVector), setCollisionMode(int), getID(), NO_OBJECT|
1 2 |
public SimpleVector checkForCollisionSpherical(SimpleVector translation, float radius) |
translation – the translation the object should performradius – the radius of the sphere (a collision will only be detected of it takes place within this radius)setCenter(com.threed.jpct.SimpleVector), setCollisionMode(int)|
1 2 3 |
public SimpleVector checkForCollisionEllipsoid(SimpleVector translation, SimpleVector ellipsoid, int recursionDepth) |
translation – the translation the object should performellipsoid – the radius of the epplisoid in x,y and z directionrecursionDepth – the max. recursion depth of the collision detection. A higher value will improve the accuracy of the collision detection but reduce performance. Reasonable values lie between 1 and 5.setCenter(com.threed.jpct.SimpleVector), setCollisionMode(int)|
1 |
public void setEllipsoidMode(int mode) |
mode – int the modeELLIPSOID_ALIGNED, ELLIPSOID_TRANSFORMED|
1 |
public int getEllipsoidMode() |
ELLIPSOID_ALIGNED, ELLIPSOID_TRANSFORMED|
1 |
public boolean wasTargetOfLastCollision() |
resetCollisionStatus()|
1 |
public void resetCollisionStatus() |
wasTargetOfLastCollision()|
1 2 |
public float calcMinDistance(SimpleVector org, SimpleVector dr) |
org – a SimpleVector containing the position vectordr – a SimpleVector containing the direction vectorCOLLISION_NONE|
1 2 3 |
public float calcMinDistance(SimpleVector org, SimpleVector dr, float ignoreIfLarger) |
org – a SimpleVector containing the position vectordr – a SimpleVector containing the direction vectorignoreIfLarger – only polygons within this range will be taken into accountCOLLISION_NONE|
1 |
public void setCenter(SimpleVector center) |
center – the centerbuild()|
1 |
public SimpleVector getCenter() |
|
1 |
public SimpleVector getTransformedCenter() |
|
1 |
public SimpleVector getTransformedCenter(SimpleVector toFill) |
|
1 |
public void setRotationPivot(SimpleVector pivot) |
pivot – the rotation pivot|
1 |
public SimpleVector getRotationPivot() |
|
1 |
public void calcCenter() |
setCenter(com.threed.jpct.SimpleVector), setRotationPivot(com.threed.jpct.SimpleVector), build()|
1 |
public void setOcTree(OcTree ocTree) |
ocTree – the octree that subdivides this object|
1 |
public OcTree getOcTree() |
|
1 |
public void setOrigin(SimpleVector origin) |
origin – the origintranslate(float, float, float)|
1 |
public void invert() |
|
1 |
public void invertCulling(boolean inv) |
inv – invert the culling?|
1 |
public boolean cullingIsInverted() |
|
1 |
public void calcNormals() |
build()|
1 |
public void calcTextureWrap() |
calcTextureWrapSpherical()|
1 |
public void calcTextureWrapSpherical() |
calcTextureWrap(), Primitives|
1 |
public void setTexture(java.lang.String texname) |
texname – 通过TextureManager.addTexture()方法添加的纹理名称|
1 |
public void setTexture(TextureInfo tInf) |
tInf – the TextureInfoTextureInfo|
1 |
public void shareTextureData(Object3D source) |
source – the source of the texturing information|
1 2 3 |
public float rayIntersectsAABB(SimpleVector org, SimpleVector dr, boolean isNormalized) |
org – the position vector of the raydr – the direction vector of the rayisNormalized – indicates, that dr is already normalized. So the method can spare another normalization.RAY_MISSES_BOX|
1 2 |
public float rayIntersectsAABB(SimpleVector org, SimpleVector dr) |
org – the position vector of the raydr – the direction vector of the rayRAY_MISSES_BOX|
1 2 |
public boolean ellipsoidIntersectsAABB(SimpleVector org, SimpleVector ellipsoid) |
org – the position vector of the ellipsoid (the ellipsoid’s center)ellipsoid – the radius of the ellipsoid in x,y and z-direction as a SimpleVector|
1 2 3 4 |
public boolean ellipsoidIntersectsAABB(float orgx, float orgy, float orgz, SimpleVector ellipsoid) |
|
1 2 |
public boolean sphereIntersectsAABB(SimpleVector org, float radius) |
org – the position vector of the sphere (the sphere’s center)radius – the radius of the sphere|
1 2 3 |
public int addTriangle(SimpleVector vert1, SimpleVector vert2, SimpleVector vert3) |
vert1 – the first vertexvert2 – the second vertexvert3 – the third vertex|
1 2 3 4 5 6 7 8 9 |
public int addTriangle(SimpleVector vert1, float u, float v, SimpleVector vert2, float u2, float v2, SimpleVector vert3, float u3, float v3) |
vert1 – the first vertexu – the u component of the texture position at the first vertexv – the v component of the texture position at the first vertexvert2 – the second vertexu2 – the u component of the texture position at the second vertexv2 – the v component of the texture position at the second vertexvert3 – the third vertexu3 – the u component of the texture position at the third vertexv3 – the v component of the texture position at the third vertexinvert()|
1 2 3 4 5 6 7 8 9 10 |
public int addTriangle(SimpleVector vert1, float u, float v, SimpleVector vert2, float u2, float v2, SimpleVector vert3, float u3, float v3, int textureID) |
vert1 – the first vertexu – the u component of the texture position at the first vertexv – the v component of the texture position at the first vertexvert2 – the second vertexu2 – the u component of the texture position at the second vertexv2 – the v component of the texture position at the second vertexvert3 – the third vertexu3 – the u component of the texture position at the third vertexv3 – the v component of the texture position at the third vertextextureID – the ID of the texture as returned by TextureManager.getTextureID()TextureManager.getTextureID(java.lang.String), invert()|
1 2 3 4 5 6 7 8 9 10 11 |
public int addTriangle(SimpleVector vert1, float u, float v, SimpleVector vert2, float u2, float v2, SimpleVector vert3, float u3, float v3, int textureID, int sec) |
vert1 – the first vertexu – the u component of the texture position at the first vertexv – the v component of the texture position at the first vertexvert2 – the second vertexu2 – the u component of the texture position at the second vertexv2 – the v component of the texture position at the second vertexvert3 – the third vertexu3 – the u component of the texture position at the third vertexv3 – the v component of the texture position at the third vertextextureID – the ID of the texture as returned by TextureManager.getTextureID()TextureManager.getTextureID(java.lang.String), invert()|
1 2 3 4 |
public int addTriangle(SimpleVector vert1, SimpleVector vert2, SimpleVector vert3, TextureInfo tInf) |
vert1 – the first vertexvert2 – the second vertexvert3 – the third vertextInf – the TextureInfoTextureManager.getTextureID(java.lang.String), TextureInfo, invert()
|
1 |
public Matrix getInverseWorldTransformation() |
|
1 |
public Matrix getInverseWorldTransformation(Matrix mat) |
将obj和mtl文件放在Android项目中的src/main/assets目录下,在java代码中使用如下代码加载3D模型文件
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 |
private Object3D demoObj; private void loadObject() { InputStream mtlStream = null; InputStream objStream = null; try { objStream = getResources().getAssets().open("jeep.obj"); mtlStream = getResources().getAssets().open("jeep.mtl"); } catch (IOException e) { e.printStackTrace(); } Object3D[] demoobjs; demoobjs = Loader.loadOBJ(objStream, mtlStream, 0.7f); demoObj = new Object3D(0); for(Object3D obj3d: demoobjs){ demoObj = Object3D.mergeObjects(demoObj, obj3d); } // demoObj.rotateX(3f); // demoObj.rotateY(-1.5f); // demoObj.rotateZ(0.12f); // demoObj.rotateX(-0.1f); // demoObj.translate(0.8f, 0, -8); } |
需要在Android 1.5以上运行,如果需要使用OpenGL ES 2.0,需要在Android 2.2或以上。
下载jPCT-AE库,将jpct_ae.jar添加到项目中。
jPCT-AE不是线程安全,尽量不要跨线程操作jPCT-AE的对象。
GLSurfaceView的Render方法是在Android的主UI线程中运行的吗?
答:onDrawFrame是用于进行实际渲染的方法,运行在Render子线程中。
用于初始化创建或者更新World和FrameBuffer等对象。
实际的渲染过程所在的方法。
可以进行实际的绘制操作,也可以进行绘制帧率的计算或者控制(比如控制帧率为30fps以节省设备电量)。
通常,一些图像库的坐标系是这样的,
向右为x轴正向,向上为y轴正向,指向屏幕外为z轴正向,
但是jPCT的坐标系不太一样,jPCT和上述坐标系比较的话,围绕x轴旋转了180度,如下:
向右为x轴正向,向下为y轴正向,指向屏幕内为z轴正向。
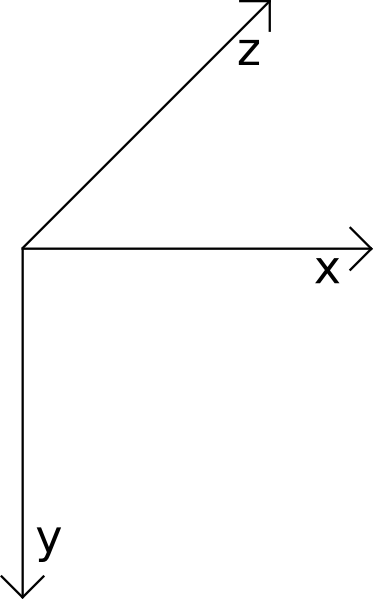
如果你同时使用了其他不同坐标系的代码,需要对坐标进行一些转换。
https://www.jpct.net/wiki/index.php?title=Reducing_memory_usage
博文背景:imx 8qxp主板,android8.1系统,系统编译模式userDebug模式
一、开启成功的步骤
|
1 2 3 4 5 6 7 8 9 |
Fastboot: Got bootloader commands! 1 setufp mode 0 1 cdns3_uboot_initmode 0 flashing unlock. It is able to unlock device. 1 Start /data wipe process.... Wipe /data completed. Start stored_rollback_index wipe process.... Wipe stored_rollback_index completed. |
饿汉模式在声明静态内部对象时就创建该对象,就是不管在程序中是否用到这个静态对象都会创建它,对于不一定会使用该对象的程序是一种资源的浪费,代码如下:
|
1 2 3 4 5 6 7 8 9 |
public class SingletonTest { private static SingletonTest _singleton = new SingletonTest(); private SingletonTest() { } public static SingletonTest instance(){ return _singleton; } } |
因为饿汉模式在声明的时候就创建了,所以不会有线程安全问题
对于构造函数需要传入参数的单例也没办法这样创建
懒汉模式,即在使用的时候才去创建它,相对于饿汉他有点懒,但其实他不懒
代码如下:
|
1 2 3 4 5 6 7 8 9 10 11 12 |
public class SingletonTest { private static SingletonTest _singleton ; private SingletonTest() { } public static SingletonTest instance(){ if(_singleton == null) { _singleton = new SingletonTest(); } return _singleton; } } |
假如在多个线程中都会用到这个单例对象,那么就有可能造成实例出多个对象的问题了,就是这种方式是线程不安全的
我们在instance()方法前加上synchronized修饰,这样多个线程就不可能同时进入instance方法了,也不会造成new多个实例的问题了
代码如下:
|
1 2 3 4 5 6 7 8 9 10 11 12 |
public class SingletonTest { private static SingletonTest _singleton = null; private SingletonTest() { } public synchronized static SingletonTest instance(){ if(_singleton == null) { _singleton = new SingletonTest(); } return _singleton; } } |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
public class SingletonTest { private static SingletonTest _singleton = null; private SingletonTest() { } public static SingletonTest instance(){ if(_singleton == null) { synchronized (SingletonTest.class) { _singleton = new SingletonTest(); } } return _singleton; } } |
这种方式看似加了一个锁,但是多个线程可能同时进入到if的判断语句中,同样不能保证_singleton的唯一性
代码如下:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
public class SingletonTest { private volatile static SingletonTest _singleton = null; private SingletonTest() { } public static SingletonTest instance(){ if(_singleton == null) { synchronized (SingletonTest.class) { if(_singleton == null) { _singleton = new SingletonTest(); } } } return _singleton; } } |
举例:short类型的值范围为-32768 ~ 32767,看下面这些对short值的操作
|
1 2 3 4 5 6 7 8 9 10 11 |
short s32768 = (short) 32768; System.out.println("32768强制转换后的结果为:" + s32768); short s32769 = (short) 32769; System.out.println("32769强制转换后的结果为:" +s32769); short s65535 = (short) 65535; System.out.println("65535强制转换后的结果为:" +s65535); short s65536 = (short) 65536; System.out.println("65536强制转换后的结果为:" +s65536); |
最后的输出结果为:
|
1 2 3 4 |
32768强制转换后的结果为:-32768 32769强制转换后的结果为:-32767 65535强制转换后的结果为:-1 65536强制转换后的结果为:0 |
对于长度小于或者等于int的数据类型,如short, byte在进行如下运算后,其他运算结果为int型
<<,>>,>>>,&,|,^,+,-,*,/
如下代码,就会提示你将运算强制转换成short类型
|
1 2 |
short b222 = 10; short sdddd = b222 - 8; |
可以通过&运算将有符号号转为无符号数,
对于byte类型& 0xFF,
对于short类型& 0xFFFF,
对于int类型& 0xFFFFFFFF
注意&运算完的结果是一个int型的值
下面看一个示例代码:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 |
public static void main(String[] args){ byte negb = -8; int negbint = negb & 0xFF; int castint = (int)negb; System.out.println("-8: " + byte2binary(negb)); System.out.println("-8 & 0xFF: " + negbint); System.out.println("negbint: " + int2binary(negbint)); System.out.println("-8 强制转换成int: " + castint); System.out.println("castint: " + int2binary(castint)); } public static String int2binary(int value){ String ibstr = Integer.toBinaryString(value); // 显示全部二进制字符,32位 while (ibstr.length() < 32){ ibstr = "0" + ibstr; } String ibstr1 = ibstr.substring(0, 8) + " " + ibstr.substring(8, 16) + " " + ibstr.substring(16, 24) + " " + ibstr.substring(24, 32); return ibstr1; } |
运行结果:
|
1 2 3 4 5 |
-8: 11111000 -8 & 0xFF: 248 negbint: 00000000 00000000 00000000 11111000 -8 强制转换成int: -8 castint: 11111111 11111111 11111111 11111000 |
强制类型转换并没有改变符号。
负数的左移位操作会使数据保持为负数
个人比较喜欢c语言,所以后面的编程都会使用c语言。
使用c语言的话可以使用用wiringPi类库。
1、查看是否安装wiringPi类库,输入下面的命令,如果返回版本信息则表示已安装wiringPi库
|
1 |
$ gpio -v |
2、如果没有安装,输入下面的命令安装
|
1 |
sudo apt-get install wiringpi |
3、wiringPi源码
github上有一个wiringPi的代码库,但那个并不是wiringPi的源码,其源码在下面这个地址中
将Led灯的两个针脚分别连到GND和GPIO0两个接口上,网上有的教程还说要连上一个电阻,但是俺没有,就直接连上了。
新建一个ledblink.c文件,然后输入下面的代码
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 |
#include <stdio.h> #include <wiringPi.h> #define LED 0 #define BLINK_INTERVAL 500 int main(void){ printf("LED blink!\n"); wiringPiSetup(); pinMode(LED, OUTPUT); for(;;){ digitalWrite(LED, 1); delay(BLINK_INTERVAL); digitalWrite(LED, 0); delay(BLINK_INTERVAL); } return 0; } |
输入下面的命令编译
|
1 |
gcc -o ledblink ledblink.c -lwiringPi |
编译完成后,会生成一个ledblink的可执行程序,输入./ledblink运行,看led灯是不是开始闪烁了!